
机器人安全回路常见架构及特点

在机器人的设计过程中,为了提高产品安全性,或者通过欧盟的CE、MD或者SIL认证,往往会增加很多安全回路,例如紧急停止、使能、障碍物检测、速度控制、安全光栅、轴限位、供电等等。很多相关标准中都提出了这些安全回路的架构需求,那么这些安全回路应该遵循什么架构呢?怎样才算满足这些架构呢?本文将重点介绍ISO13849-1-2015中所涉及的5种架构。为机器人的设计者设计和论证安全回路满足相关标准要求提供指导。
在ISO13849-1中介绍了5种安全回路的架构,这些架构可以用于整条安全回路的设计,也可以用于回路中各组成部分的设计,例如输入单元(传感器、开关、按钮等)、逻辑控制单元(安全PLC、安全继电器、控制板等)和输出单元(接触器、继电器等),对于比较简单的安全回路,往往是整体条回路满足架构要求即可。对于比较复杂的安全回路,输入单元、逻辑控制单元和输出单元可以单独满足架构的要求,最后再组合到一起判定。目前来看,逻辑控制单元在设计时单独满足架构的要求比较多,而且往往都要通过SIL认证。
下文将详细介绍每一种架构、架构特点以及如何满足:
1、CB 架构
a)典型的图样
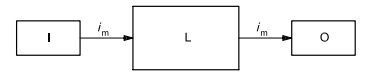
im连接方式;
1、I 输入装置,例如传感器;
2、 L 逻辑单元;
3、O 输出装置,如主接触器。
b)架构特点:
1、单故障即可导致安全功能失去;
2、没有诊断覆盖率要求(DC);
3、最大可实现的性能等级PL=b。
c)判定条件
1、回路的设计应该满足基本的安全原则(见ISO 13849-2 2013附录表A.1(机械回路),B.1(气动传动回路),C.1(液压传动回路)和D.1(电子电气回路)的要求)。这些原则可以根据回路实际情况使用,对于不适用的应说明理由。
2、Ø 每个通道的平均危险失效时间MTTFd至少三年。这个指标需要通过计算满足,计算常用Sistema的免费软件进行。
3、Ø 应该通过必要的环境测试。需要根据实际使用环境条件,制定测试计划,并选择有资质的实验室执行测试,出具试验报告。
2、C1架构
a) 典型的图样
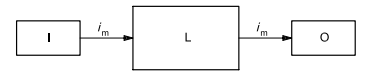
im连接方式;
1、I 输入装置,例如传感器;
2、 L 逻辑单元;
3、O 输出装置,如主接触器。
b) 架构特点
1、要求使用经过验证的或遵循安全原则(ISO 13849-2附录A.3和D.3)的元器件。
2、没有诊断覆盖率(DC);
3、Ø 最大可实现的PL=C.
c) 判定条件
1、满足CB的架构要求;
2、Ø 要求使用经过验证的或遵循安全原则(ISO 13849-2 附录A.3和D.3)的元器件;
3、Ø 要求使用经过证明的比较的好的安全原则(见13849-2 附录表A.2(机械回路),B.2(气动传动回路),C.2(液压传动回路)和D.2(电子电气回路)的要求)。这些原则可以根据回路实际情况使用,对于不适用的应说明理由;
4、MTTFd至少30年,这个指标需要通过计算满足,计算常用Sistema的免费软件进行。必要时,需要进行失效模式及影响分析(FMEA)来计算。
3 、C2架构
a)典型的图样
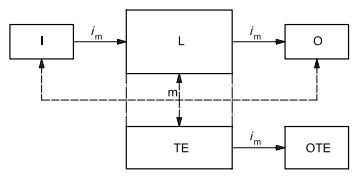
im连接方式;
1、 I 输入装置,例如传感器;
2、 L 逻辑单元;
3、O 输出装置,如主接触器;
4、m 监测;
5、TE 测试设备;
6、OTE 测试设备的输出。
b) 结构特点
1、在两次诊断测试的间隔期间发生故障,会导致安全功能的失去;检查频率的设计最为重要(测试率应是需求率的100倍或安全功能需要时立刻检测,但检测+拒绝时间应小于导致隐患存在的时间);
2、最大的可实现的PL=d;
3、测试设备可以集成进SRP/CS 或分开;
4、检测出故障之后的响应时间的确定非常重要;
5、共因失效CCF需要考虑(见ISO 13849-1 2015附录F);
6、不需要检测出所有故障. 诊断覆盖率(DC)应达到60%-99%。
c) 判定条件
1、满足架构CB的要求;
2、要求使用经过证明的比较的好的安全原则(见13849-2 附录表A.2(机械回路),B.2(气动传动回路),C.2(液压传动回路)和D.2(电子电气回路)的要求)。这些原则可以根据回路实际情况使用,对于不适用的应说明理由;
3、监测设备在检查出安全回路的故障后,应激发一个安全状态,如果不可能的话,则需要报警。
4、监测设备本身不能引入一个非安全状态,这个可以通过借助失效模式及影响分析FMEA,避免测试设备故障影响安全回路;
5、监测设备需要在设备启动时和运营过程中周期性在线监测;
6、安全回路的平均危险失效时间MTTFd至少3年,这个指标需要通过计算满足,计算常用Sistema的免费软件进行。必要时,需要进行失效模式及影响分析(FMEA)来计算。
7、Ø 监测设备的平均危险失效时间MTTFd至少大于安全回路的MTTFd的一半;
8、测试频率大于100倍的需求率,安全功能的需求率可以通过计算设备本体的危险失效率来得到;
9、诊断覆盖率(DC)至少60%;
10、共因失效CCF得分至少大于65分(打分表见ISO 13849-1 附录F)。
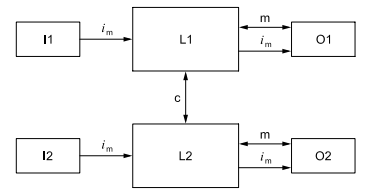
4、C3架构
a) 架构图样

im连接方式;
1、I1,I2输入装置,例如传感器;
2、 L1,L2逻辑单元;
3、O1,O2输出装置,如主接触器;
4、c交叉监测;
5、m监测;
6、虚线代表合理的故障诊断即可。
b) 架构特点
1、任何单故障不能导致安全功能丧失;
2、诊断覆盖率(DC)至少是low;
3、共因失效CCF得分至少大于65分(打分表见ISO 13849-1 附录F);
4、最大可实现PL=e。
c)判定条件
1、满足CB的要求;
2、要求使用经过证明的比较的好的安全原则(见13849-2 附录表A.2(机械回路),B.2(气动传动回路),C.2(液压传动回路)和D.2(电子电气回路)的要求)。这些原则可以根据回路实际情况使用,对于不适用的应说明理由;
3、单故障不能导致安全功能的丢失;
4、单故障应该被检测;
5、每个通道的MTTFd至少3年,安全回路的平均危险失效时间MTTFd至少3年,这个指标需要通过计算满足,计算常用Sistema的免费软件进行。必要时,需要进行失效模式及影响分析(FMEA)来计算。
6、诊断覆盖率(DC)至少60%;
7、共因失效CCF得分至少大于65分(打分表见ISO 13849-1 附录F)。
5、C4架构
a)架构图样
im连接方式;
1、I1,I2输入装置,例如传感器;
2、L1,L2逻辑单元;
3、O1,O2输出装置,如主接触器;
4、c交叉监测;
5、m监测;
6、实线代表故障诊断要求比架构3高。
b) 架构特点
1、诊断覆盖率要求为High 90%-99%.
2、平均危险失效时间MTTFd 要求为High;
3、CCF需要考虑(附录F);
4、任何单点故障都不能导致安全功能丧失,响应时间也应足够;
5、不可检测的累积故障也应考虑。
c)判定条件
1、满足CB的要求;
2、要求使用经过证明的比较的好的安全原则(见13849-2 附录表A.2(机械回路),B.2(气动传动回路),C.2(液压传动回路)和D.2(电子电气回路)的要求)。这些原则可以根据回路实际情况使用,对于不适用的应说明理由;
3、单故障不能导致安全功能的丧失;
4、单故障应该被诊断,诊断覆盖率至少99%;
5、如果单故障的诊断覆盖率不到99%,则累积故障应该被考虑;
6、MTTFd至少30年,这个指标需要通过计算满足,计算常用Sistema的免费软件进行。必要时,需要进行失效模式及影响分析(FMEA)来计算;
7、共因失效CCF得分至少大于65分(打分表见ISO 13849-1 附录F)。
以上是机器人安全标准中常提到安全回路的架构,这些架构在安全回路的设计时是要糅合到设计中的。这样既能提高机器人的安全性,降低事故发生的频率,也为后续的CE\MD\SIL认证打好基础。
沃德检测是首家民营机器人检测认证机构,集检测、检验、认证、验货、技术培训、实验室建设和资质申请为一体的综合性第三方公共服务平台。目前开展的与机器人相关的业务有:机器人性能评估、安规、EMC、功能安全与风险评估、零部件测试等等。
沃德检测拥有专业的技术团队,主要认证项目有:机器人CR,中国CCC、SRRC、欧盟CE、ROHS、REACH、美国UL、ETL、韩国KC、体系ISO9001、ISO14001以及机器人性能测试(GB12642 & ISO9283)等等,欢迎来电咨询。
更多详情请点击:
http://www.worldtest.cn
http://www.robot-testing.com
更多资讯请关注沃德检测微信公众号
- 上一篇:机器人的风险评估你知道多少?
- 下一篇:智能制造领域中无线技术的应用及检测--蓝牙篇

