
如何确定机器人安全功能的PL等级?
对于机械设备的设计者来说,为了安全,往往会增加很多安全功能,像急停、使能、安全联锁、速度控制等都是常见的安全功能,业主或者监管机构很多都会要求应满足一定PL等级。那么这个PL等级怎么来的呢?本文将基于作者对行业的经验,介绍PL等级的确定方法。
PL等级的来源总共分为两类,一类是对于有成熟产品安全标准的设备来说,在标准的条款中会有清晰的定义。例如工业机器人的产品安全标准ISO 10218,物流机器人AGV的EN1525/EN1526,机床设备的产品安全标准EN ISO 23125中。这些标准中有的会直接定义安全功能需要达到的PL等级,见图1;有的会定义安全功能的架构要求(CB,C1~C4),如图2。需要说明的是
1、 不管架构要求还是PL要求,具体如何满足要求的内容都在ISO 13849中;
2、 在ISO 13849中,架构要求只是满足PL要求的一部分,如果需满足PL要求,还要考虑到安全功能设计时的系统性失效的要求、软件的要求、配置工具的要求、定量计算的要求等。
3、 包含架构要求的标准一般是老版本的标准,从目前趋势上来看,新版的机械设备或机器人相关标准,都改成了PL的要求。
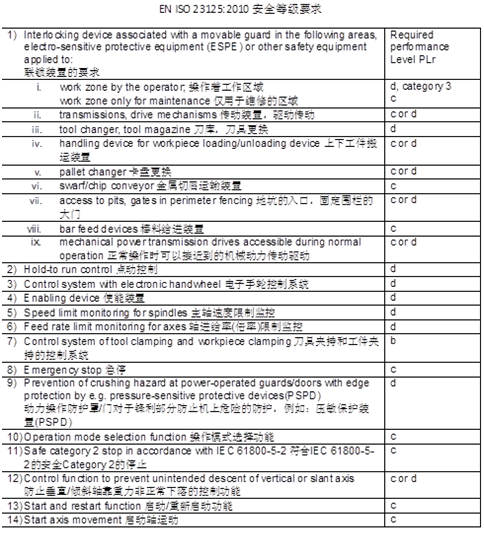
图1 机场设备的PL等级的定义

图2 AGV物流机器人中安全功能的架构要求
PL的定级的第二类方法是基于风险分析的方法得到的,这种方法主要适用于没有产品安全标准或产品安全标准正在制作的机械设备和机器人上的。这种方法首先是要求设计者基于ISO 12100的标准,对设备进行风险识别,识别出设备可能对使用人员和维护人员造成伤害的风险点,并给出安全措施。其次是对于涉及需增加安全功能的安全措施,应用适当的方法确定安全功能的PL要求。基于ISO 12100的风险分析,受篇幅有限,将在其他文章中介绍,本文将重点介绍如何使用适当的方法得到安全功能的PL等级。
对于机械设备或机器人来说,通常使用的方法是ISO 13849中介绍的风险图,该方法是一个定性的方法,主要从三个方面来评价风险点(例如图3中的1),并且按图3依次判断风险的三个方面,最后得到应对该风险的安全功能所需的PL等级。三个参数分别是伤害的严重性、人员暴露在风险下的频率以及人员躲避风险或限制伤害的概率。这三个指标评判准则在标准中有一定的主观性,没有定量化。如果企业或行业内有更进一步的、更量化的评判准则,则应优先使用。
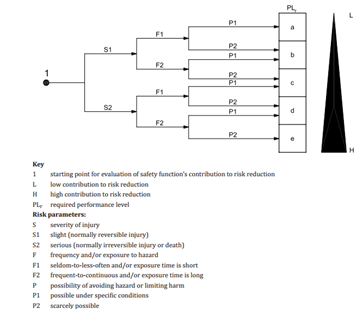
图3 确定安全完整性等级的方法-风险图
此外,对于有风险定量数据支持的情况,并且需要单个或多个安全功能应对一个风险的情况下,也可以采用其他的方法,这样的方法有很多,例如故障树分析,保护层分析等。这里的定量数据支持的情况指的是风险发生的概率是可以利用一定的方法得到的(如设备本体的危险失效率的计算、人因可靠性的评估等)。故障树分析可以参考GJB 768A,保护层分析可以参考GBT 32857。下面将介绍一下保护层分析。
保护层分析方法是一种半定量的风险评价方法,它定性风险分析的基础上通过评价保护层要求时危险失效概率来判断现有保护层是否可以将特定场景下的风险降低到标准或行业所要求的水平。如果达不到,则会得到需要新增的保护层允许的危险失效概率,对照PL等级的范围,得到PL的要求。
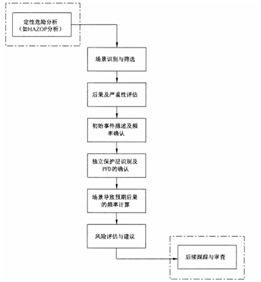
图4 保护层分析的基本流程
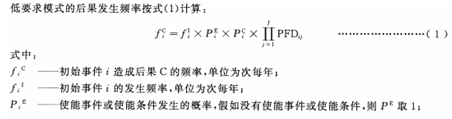
保护层分析的核心计算公式如下所示:

不管如何确定安全功能的PL等级,整体来说,设计者应根据设备实际情况而定,且要遵循必要的原则和过程,如果以上提供的方法都不适用,也可以参考通用的功能安全标准IEC61508-5的内容。
沃德检测是首家民营机器人检测认证机构,集检测、检验、认证、验货、技术培训、实验室建设和资质申请为一体的综合性第三方公共服务平台。目前开展的与机器人相关的业务有:机器人性能评估、安规、EMC、功能安全与风险评估、零部件测试等等。

沃德检测拥有专业的技术团队,主要认证项目有:机器人CR,中国CCC、SRRC、欧盟CE、ROHS、REACH、美国UL、ETL、韩国KC、体系ISO9001、ISO14001以及机器人性能测试(GB12642 & ISO9283)等等,欢迎来电咨询。
更多详情请点击:
更多资讯请关注沃德检测微信公众号


