
激光跟踪仪在工业机器人DH模型标定中的应用
在《激光跟踪仪在工业机器人性能检测中的应用》中提到了徕卡激光跟踪仪可用于工业机器人DH模型的标定。我们知道,工业机器人的位置重复性很好,一般国产机器人都可以达到0.02mm左右;而位置准确度则差得多,未经标定通常只有10-20mm。而通过标定,机器人的位置准确度得到大大提高,可达1mm左右。
利用激光跟踪仪标定工业机器人DH模型可分四个步骤:建立DH模型、测量、参数识别、补偿参数。
1.建立DH模型:
什么是DH模型?DH模型是目前最流行的机器人运动学模型。DH模型可分为标准DH模型(sDH模型)和改良DH模型(mDH模型)。
机器人运动学模型用于建立机器人关节空间和工作空间(笛卡尔空间)的映射关系。例如,对于常见的串联六轴机器人,给出关节J1、J2、J3、J4、J5和J6的角度值,怎样得到第6轴末端的位姿?6个关节的角度值和第6轴末端的位态是怎样的对应关系?DH模型正可用于建立6个关节的角度值和第6轴末端位姿的映射关系。
在机器人的每个连杆(轴)上固连直角坐标系,然后用4x4的齐次变换矩阵来描述相邻连杆的空间关系,通过依次变换可最终推导出末端工具相对于基坐标系的位姿。直角坐标系由两两相交且相互垂直的轴构成:X轴、Y轴和Z轴。因此,一个三维直角坐标系有六个变换自由度:沿X、Y和Z轴的平移;绕X、Y和Z轴的旋转自由度。通过这六个自由度,三维直角坐标系可以完成任意线性变换,移动到任意位置。
而用DH模型描述机器人相邻连杆坐标系的变换只需要4个参数,这是因为机器人的关节通常是绕着一根固定轴线旋转的铰连接,通过选择合理的坐标系定义,可用4个参数建立机器人相邻两连杆坐标系的变换关系,这4个参数是:沿着X轴的平移距离Dx(A),绕X轴的旋转角度Rx(Alpha),沿Z轴的平移距离Dz(D),绕Z轴的旋转角度Rz(Theta)。
下面简单介绍建立mDH模型的过程。

建立连杆坐标系的步骤:
1.找出各关节轴,并标出这些轴线的延长线。在下面的步骤2至步骤5中,仅考虑两个相邻的轴线(关节轴i和i+1)。
2.找出关节轴i和i+1之间的公垂线或关节轴i和i+1的交点,以关节轴i和i+1的交点或公垂线与关节轴i的交点作为连杆坐标系{i}的原点。
3.规定Zi轴沿着关节轴i的指向(右手法则)。
4.规定Xi轴沿公垂线的指向,如果关节轴i和i+1相交,则规定Xi轴垂直于关节轴i和i+1所在的平面。
5.按照右手定则确定Yi轴。
如果按照上述规定将连杆坐标系固连于连杆上,连杆参数可以定义如下:
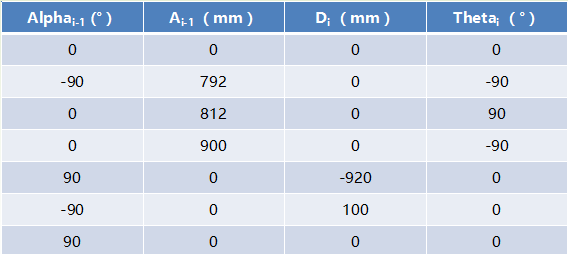
Alphai-1 = 沿Xi-1轴,从Zi-1旋转到Zi的距离。
Ai-1 = 沿Xi-1轴,从Zi-1移动到Zi的距离。
Di = 沿Zi轴,从Xi-1移动到Xi的距离。
Thetai = 绕Zi轴,从Xi-1旋转到Xi的角度。
一个串联六轴机器人mDH的例子:
2.测量
在徕卡激光跟踪仪软件Robodyn中建立机器人DH模型后,Robodyn会生成一个标定空间,在这个空间内生成目标点(标定空间的位姿、大小和目标点数量可以修改),末端装有辅助测量装置的机器人移动到目标点,激光跟踪仪进行测量,Robodyn会动态模拟机器人的移动和跟踪仪的测量。
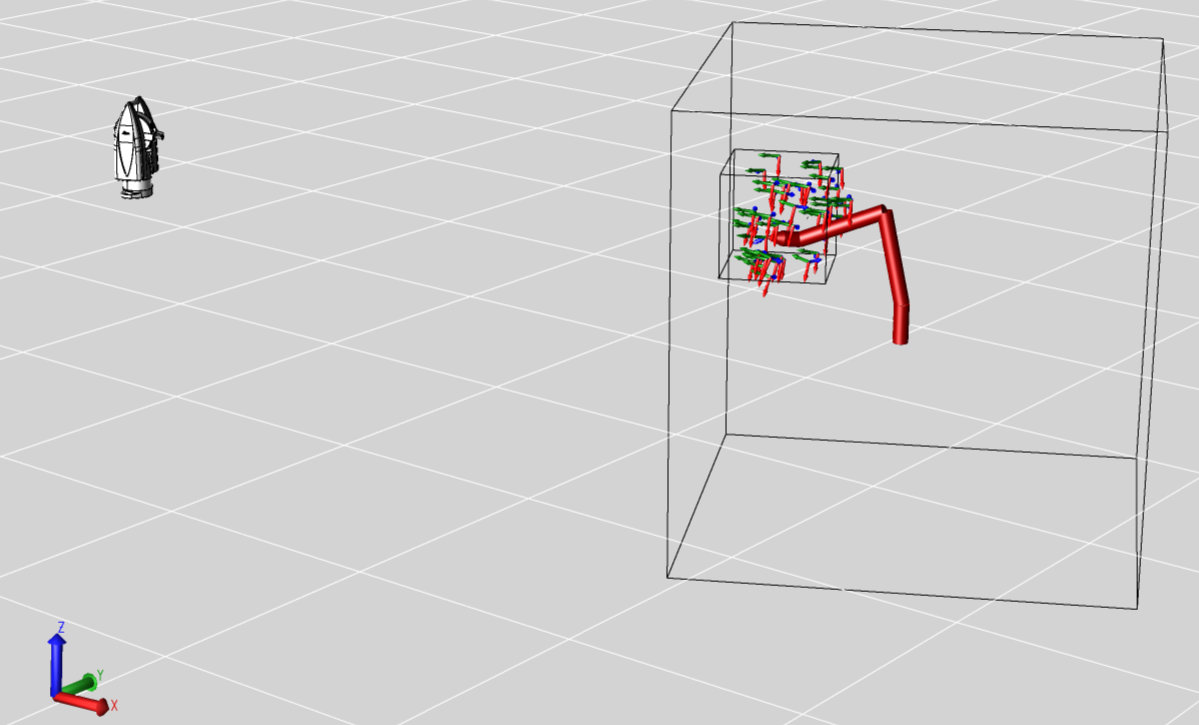
Robodyn中生成标定空间和标定目标点的实例
3.DH模型参数识别
测量完成后,理论和实测两组数据之间对照得到的偏差作为优化的目标函数,选择需要优化的DH参数和减速比,依次进行基坐标系、工具坐标系、减速比和DH参数的计算,得到修正的DH参数和减速比。

Robodyn进行参数识别计算的实例
4.参数补偿
得到修正的DH参数和减速比后,更新控制器内部参数即可进行参数补偿。标定后,Robodyn会模拟计算出标定后的目标点的位姿准确度。
如果需要比较标定前后的位姿准确度的变化,①可以立即更新机器人控制器内参数,进行位姿态准确度测试;②也可以让Robodyn模拟机器人进行了DH参数和减速比修正,生成修正后的位姿态准确度测试目标点,再进行位姿态准确度测试。将①或②的位姿态准确度测试结果与标定前的位姿态准确度测试结果进行比较,可以对比得到标定的效果。同时,为规范行业发展,还需要有专业的第三方检测机构对机器人的性能指标、机械电气安全进行检测,协助企业制定检验方法以及完善相关的标准体系建设。
沃德检测作为机器人检测认证引领者,集检测、检验、认证、验货、技术培训、实验室建设和资质申请为一体的机器人检测认证一站式综合方案服务商。目前开展的与机器人相关的业务有:安规、EMC、机器人性能测试、可靠性测试、功能安全与风险评估、关键零部件测试等等。

沃德检测拥有两名博士及多名硕士研究生组成的技术专家团队,主要认证项目有:机器人CR,中国CCC、SRRC、欧盟CE、ROHS、REACH、美国UL、ETL、机器人性能测试、功能安全相关培训及测试(ISO13849、IEC62061、IEC61508)、体系ISO9001、ISO14001等等,欢迎来电咨询。
更多详情请点击:
http://www.worldtest.cn
http://www.robot-testing.com
更多资讯请关注沃德检测微信公众号

快手推广:快手推广
快手开户:快手开户
快手代理:快手代理
快手广告:快手广告
快手推广:快手推广
快手开户:快手开户
快手代理:快手代理
快手广告:快手广告
太原代理记账:太原代理记账
太原注册公司:太原注册公司
太原代理记账:太原代理记账
太原注册公司:太原注册公司
太原代理记账:太原代理记账
太原注册公司:太原注册公司

